UFACTORYのロボットアームLITE6のリンクパラメータを調査しました.その内容を記載します.
UFACOTRYのロボットアームにはROSのパッケージが用意されているので,そのパッケージ内のURDFから調査することとしました.
https://github.com/xArm-Developer/xarm_ros.git
パッケージは上記URLにgithubリポジトリとしてアップロードされています.
視覚的にリンク間の関係を確認したり,整理されたデータを確認するためURDFをRVIZにロードしてデータを見ていきます.
パッケージをワークスペースにクローンし,ビルド後下記launchファイルを実行することでLITE6のURDFモデルをRVIZにロードできます.
roslaunch xarm_description lite6_rviz_display.launch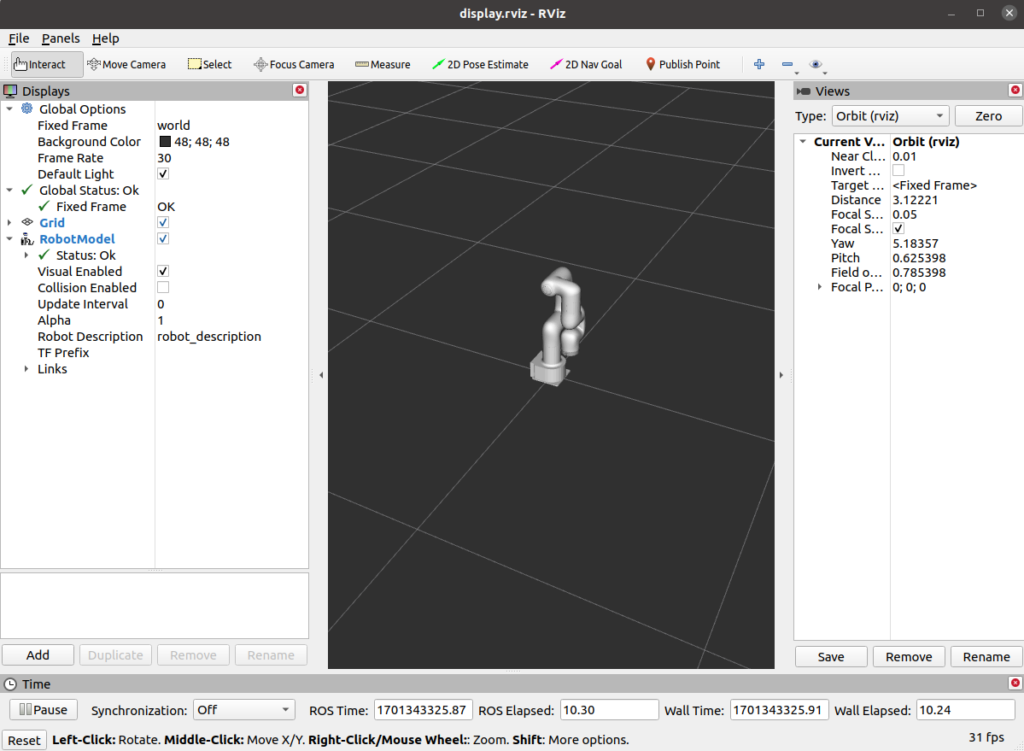
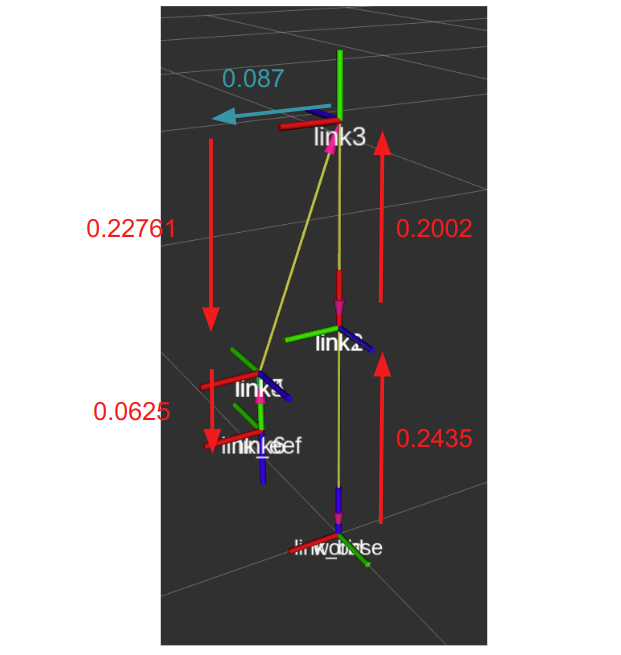
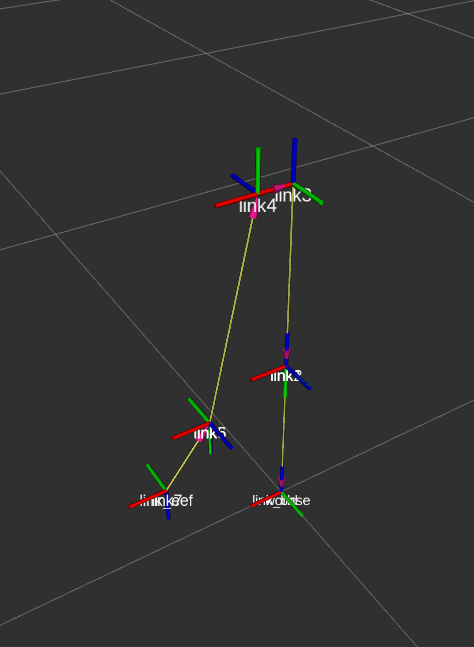
今回はリンク間の関係に注目したいのでtfの様子をみていきます.Addからtfを追加しRobotModelをオフにしtfのみを表示します.
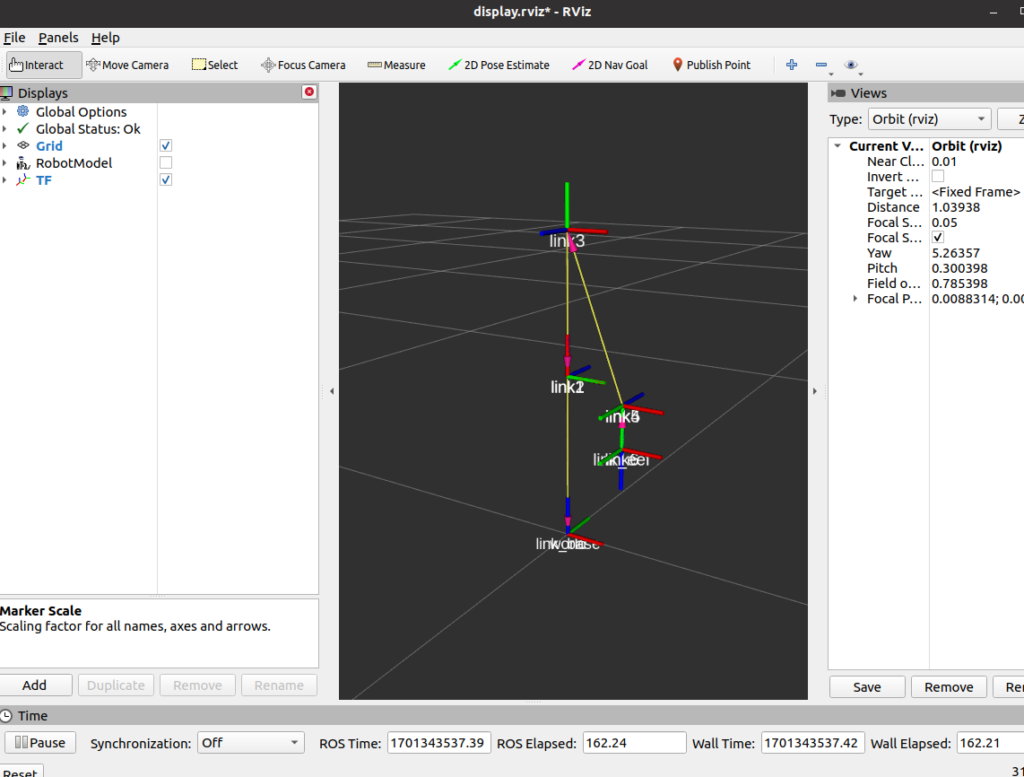
視覚的にリンク間の関係を確認できたので次に詳細なTFのデータを追っていきます.
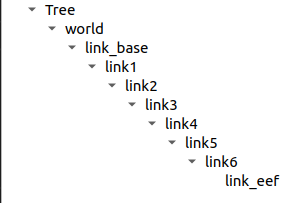
まずTFのツリーは以下のようになります.これがURDFに定義されているリンクツリーとなります.
リンク間のオフセットは以下のように記載されていました.
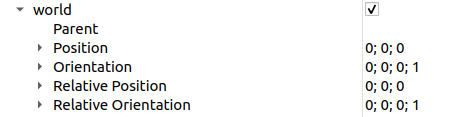
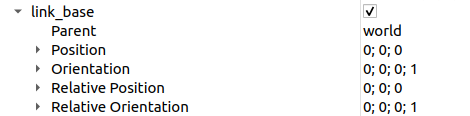







上記内容のうち,Relative Positionの値が変化する部分に注目し整理すると,目的の数値であるリンク間のオフセットが取得できました.
- link_base => link1 (0, 0, 0.2435)
- link2 => link3 (0.2002, 0, 0)
- link3 => link4 (0.087, -0.22761, 0)
- link5 => link6 (0, 0.0625, 0)
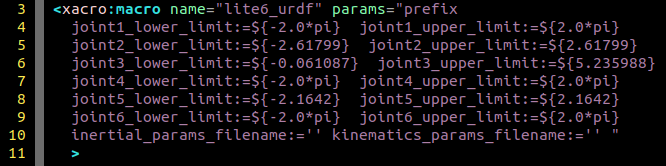
また,xarm_ros/xarm_description/urdf/lite6/lite6.urdf.xacroによると関節の可動域は以下のように定義されていました.
(おまけ)
LITE6以外のモデルを出力してみた様子など,その他のおまけ的な内容を記載します.
- xarm 7
roslaunch xarm7_rviz_display.launch
- xarm 6
roslaunch xarm6_rviz_display.launch

- uf850
uf850_rviz_display.launch
- xarm5
roslaunch xarm5_rviz_display.launch